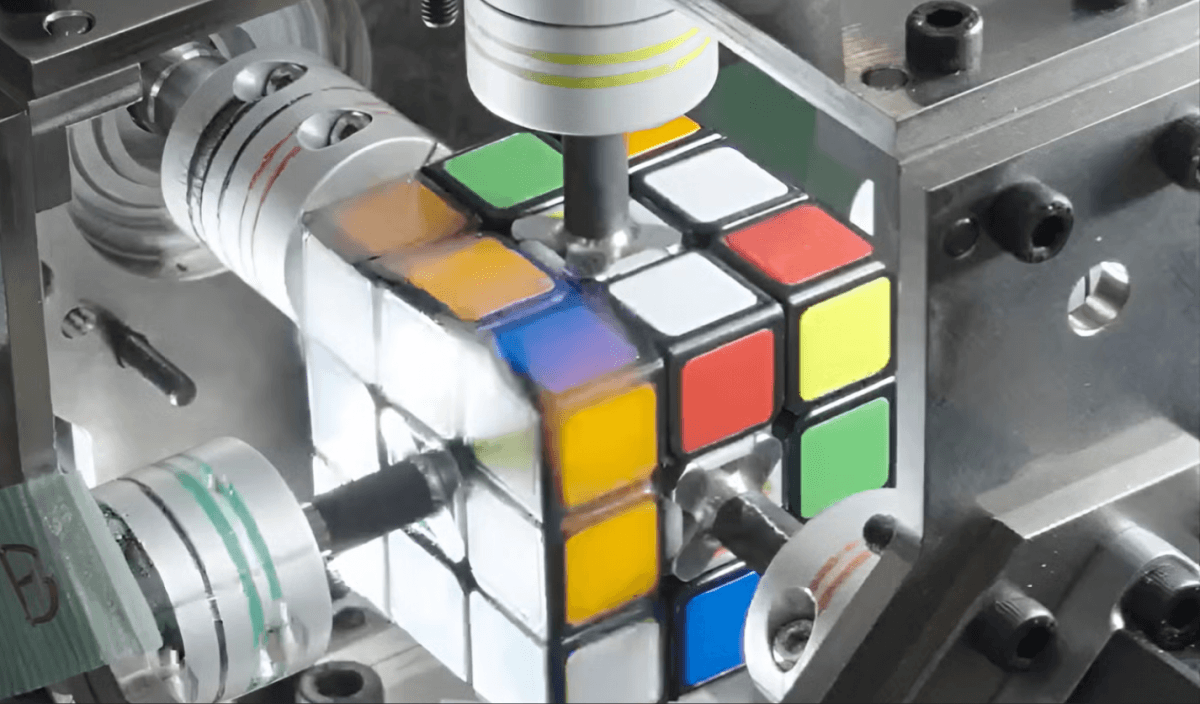
Robot Mitsubishi Electric překonal světový rekord ve skládání Rubikovy kostky neuvěřitelným časem 0,305 sekundy, což je rychlost srovnatelná s lidským mrknutím. Tento úspěch je výsledkem pokročilé robotiky a vysoce výkonných motorů, které dokážou otočit kostku za zlomek milisekundy. Klíčem k řešení takové rychlosti je dokonalá synchronizace hardwaru a algoritmů, které předem znají nejkratší možnou sekvenci tahů.
Představte si, že se podíváte na promíchanou Rubikovu kostku, a než stihnete mrknout, je kompletně složená. Přesně to dokázal robotický systém vyvinutý inženýry společnosti Mitsubishi Electric. Zatímco lidským šampionům trvá řešení několik sekund a vyžaduje nesmírnou zručnost a paměť, robot to zvládl za pouhých 0,305 sekundy. Tento výkon není jen o brutální síle; je to ukázka precizního inženýrství, kde každý milisekundový pohyb musí být dokonale naplánován a proveden.
Jak je něco takového možné? Hlavolam, který lidé řeší pomocí algoritmů a rozpoznávání vzorů, se pro stroj stává čistě matematickým a inženýrským problémem. Robot nejprve pomocí senzorů analyzuje rozložení barev. Následně jeho výpočetní jednotka v reálném čase vypočítá nejkratší možnou sekvenci tahů potřebných k řešení. Skutečná výzva pak spočívá v tom, jak tuto sekvenci fyzicky provést co nejrychleji, aniž by se kostka rozbila.
| Aspekt řešení | Lidský přístup | Robotický přístup |
|---|---|---|
| Analýza pozice | Vizuální skenování a rozpoznávání vzorů | Okamžité digitální snímání a převod na matematický model |
| Plánování tahů | Použití naučených algoritmů (např. CFOP, Roux) | Výpočet optimální cesty pomocí teorie grup a předem nahraných řešení |
| Fyzické provedení | Omezeno lidskou motorikou a rychlostí prstů | Limitováno pouze fyzikálními vlastnostmi motorů a kostky |
| Klíčová dovednost | Paměť, zručnost, intuice | Přesnost, synchronizace, výpočetní výkon |
Podrobné řešení a technické triky
Abyste pochopili genialitu tohoto rekordu, musíme se ponořit hlouběji. Problém není v tom, jak kostku vyřešit – algoritmy pro to existují již desítky let. Problém je, jak ji vyřešit nejrychleji fyzicky možným způsobem. Inženýři museli překonat několik zásadních výzev:
- Rychlost motorů: Použili servomotory s neuvěřitelnou odezvou, schopné provést otočení o 90 stupňů za 0,009 sekundy.
- Minimalizace zpoždění: Veškerý proces – od snímání obrazu přes výpočet po pohyb ramene – musí být bez sebemenší prodlevy.
- Integrita kostky: Při takových silách a zrychleních hrozí, že se kostka rozletí na kusy. Bylo nutné najít tenkou hranici mezi maximální rychlostí a fyzickými limity plastového mechanismu.
„Největší překážkou nebyl software, ale fyzika. Museli jsme navrhnout pohyb tak, aby byl nejen rychlý, ale také dostatečně jemný, aby kostka přežila. Někdy je nejkratší algoritmická cesta fyzicky nerealizovatelná a musíte najít kompromis mezi matematickou a mechanickou optimalizací.“

Zkuste si představit následující mini-hlavolam: Máte dvě identické promíchané Rubikovy kostky. Jednu dostane šampion, druhou robot. Oba začnou ve stejný okamžik. Kolik tahů stihne robot provést, než šampion dokončí svůj první tah? Při lidském čase kolem 3 sekund a robotickém čase 0,3 sekundy je odpověď: robot by mohl teoreticky dokončit celé řešení a ještě „počkat“ 2,7 sekundy. To ilustruje propastný rozdíl v prováděcí rychlosti.
| Rok | Rekordní čas robota | Pokrok oproti předchozímu rekordu |
|---|---|---|
| 2009 | 64 sekund | Základní linie |
| 2016 | 0,887 sekundy | Radikální skok díky lepším kamerám a algoritmům |
| 2023 (předchozí rekord) | 0,38 sekundy | Vylepšení v mechanické konstrukci |
| 2024 (Mitsubishi) | 0,305 sekundy | Optimalizace motorů a minimalizace setrvačnosti |
Co můžeme z této robotické exhibice odnést pro naše vlastní řešení hlavolamů? I když naše ruce nikdy nebudou tak rychlé, principy zůstávají podobné. Efektivita je klíčová. Při řešení kostky se snažte minimalizovat zbytečné tahy a předvídat následující kroky. Robot nepřemýšlí, jen provádí předem optimalizovaný plán. Vy jako člověk máte výhodu intuice a pružného myšlení – můžete přizpůsobit strategii na základě toho, co vidíte. Tréninkem se vaše pohyby stanou plynulejšími a rychlejšími, i když nikdy nedosáhnou milisekundové přesnosti.


Často kladené otázky
Použil robot umělou inteligenci k řešení?
Ne v tradičním smyslu „učení“. Použil extrémně rychlý deterministický algoritmus pro hledání nejkratšího řešení, kombinovaný s předem naprogramovanými optimalizacemi pro fyzické provedení.
Je možné, že robot překoná i tento rekord?
Ano, ale další zlepšení budou velmi marginální. Hlavním limitem jsou nyní fyzikální vlastnosti samotné kostky a setrvačnost jejích dílů.
Může tento robot vyřešit jakoukoli pozici za tento čas?
Ano, jeho čas je konzistentní, protože výpočetní část je tak rychlá, že nezpůsobuje měřitelné zpoždění. Čas závisí na počtu potřebných otoček, ale ten je pro nejnáročnější konfigurace stále velmi nízký.
Jak se robot „dívá“ na kostku?
Pravděpodobně pomocí vysokorychlostních kamer, které snímají všech šest stran téměř současně a software okamžitě rekonstruuje 3D model barevného rozložení.
Proč společnost Mitsubishi Electric vůbec takový rekord zkoušela?
Primárně jako demonstrace svých technologií, zejména vysokorychlostních a přesných motorů, které pak využívá v průmyslových automatech a spotřební elektronice. Je to praktický test jejich inženýrských schopností.
Může člověk někdy tento čas překonat?
Fyzikálně je to prakticky nemožné. Lidské reflexy a svalová kontrakce mají biologická omezení, která nelze překonat. Rekord člověka se může ještě mírně zlepšit, ale nikdy nedosáhne řádu setin sekundy.
Jaký je největší technický úspěch tohoto robota?
Synchronizace. Dokonalé sladění okamžiku, kdy senzor dokončí analýzu, výpočetní jednotka odešle instrukce a motory začnou pohyb bez jakéhokoli mrtvého času.
Může tento princip řešení použít i amatér pro svůj robot?
Ano, základní principy jsou stejné: snímat, počítat, provádět. Amatérské projekty často dosahují časů kolem 1-10 sekund, protože používají pomalejší motory a jednodušší software.